Как сделать робот-пылесос?
Содержание:
Принцип действия
Механизм действия прибора базируется на применении инфракрасного излучения и датчиков, которые могут его улавливать. При выявлении такого луча на пути робот воспринимает его как препятствие. Это позволяет ему выстроить маршрут так, чтобы не пересекать черту. Применение способа ограничения участков уборки требует определенного участия человека. Расставить такие стены хозяин должен самостоятельно
В этом случае немаловажное значение имеет грамотное размещение, которое обеспечивает покрытие максимального участка для уборки
Важно следить, чтобы в зоне воздействия отсутствовали хрупкие предметы или шторы. Для более комфортного зонирования приходится использовать сразу несколько виртуальных стен

Инфракрасный луч помогает пылесосу не задевать хрупкие или опасные предметы. Хозяину достаточно установить виртуальные стены. При этом они могут включаться и выключаться вручную или автоматически при запуске робота. Конкретный режим зависит от модели. Подобные средства навигации имеются в комплекте практически всех роботов-пылесосов.
Как установить взаимодействие с док-станцией
Самым сложным этапом при настройке оборудования является установка взаимодействия с док-станцией. Она выполняет роль зарядного устройства для пылесоса и подключается к электросети.

Настраивая док-станцию, нужно руководствоваться двумя советами:
- необходимо обеспечить достаточное пространство для парковки прибора (примерно 2-3 квадратных метра);
- следует спрятать кабель, чтобы он не мог помешать ни человеку, ни пылесосу.
Приняв во внимание эти рекомендации, можно переходить к установке оборудования. У док-станции есть шнур небольшой длины с вилкой на конце
Ее необходимо вставить в розетку, а само парковочное место установить так, чтобы оно прислонялось к стене. Лишние остатки провода можно намотать на специальную катушку станции.
Следующий шаг – вручную поставить пылесос на место для зарядки. Данная процедура выполняется только при первом подключении. Далее прибор будет самостоятельно отправляться на пополнение энергии. После подключения Xiaomi Mi Robot к док-станции, нужно дождаться, когда устройство полностью зарядится. В это время можно заняться своими делами, поскольку разряженный пылесос восстанавливает энергию несколько часов.
Понять, что пылесос полностью зарядился, можно по индикатору. В процессе восстановления энергии он мигает, а после завершения операции – горит равномерным цветом.
Подключать док-станцию к телефону отдельно не нужно. Первое сопряжение с мобильным устройством происходит в таком положении, когда пылесос стоит на зарядке. Так умный прибор запомнит место своей парковки.
Подготовка к практической реализации проекта
Рассмотрим применение вышеизложенных принципов на базе платформы Arduino Mega 2560. Процесс создания будет состоять из нескольких этапов:
- подготовка инструментов и материалов;
- изготовление корпуса с колесами и отделом под мусор, пылесборника и турбины;
- монтаж датчиков и микроконтроллера, моторов с редукторами, аккумулятора, щеток;
- выполнение электрических подключений;
- введение программы в Arduino, определение согласованности датчиков;
- проверка работоспособности робота-пылесоса и его способности заряжаться самостоятельно.
Идея реализуется с помощью следующих материалов и инструментов:
- контроллер Arduino – 1 шт, с драйверами;
- лист фанеры (либо плотный картон) – 1 м.кв;
- колеса – 3 шт;
- провод сечением не более 0,75 мм.кв (подойдет витая пара) – около 2 м;
- блок питания – 4 аккумулятора по 18 V, индикатор заряда к ним, зарядное устройство;
- инфракрасные датчики – 4 шт, контактные – 2 шт;
- электродвигатели: для турбины – 1 шт, вращающий щетку – 1 шт, 2 мотора с редуктором обеспечивают передвижение;
- поливинилхлоридный корпус – 1 шт;
- клей – 1 упаковка, саморезы – 10 шт, скотч – 1 шт, набор магнитов;
- набор отверток и сверл, плоскогубцы, нож канцелярский, карандаш, линейка, шуруповерт, электролобзик.
Как подключить робот-пылесос к телефону с помощью приложения
После завершения процедуры зарядки домашний уборщик готов к настройке для дальнейшего использования. Под настройкой понимается подключение робота-пылесоса к смартфону. Именно смартфон выполняет функцию главного управляющего элемента.
Для взаимодействия со смартфоном будет использоваться приложение Mi Home. Оно доступно на таких известных платформах, как Android и iOS. Поскольку операционные системы сами по себе сильно отличаются, настройка может вызвать некоторые затруднения. Чтобы этого не произошло, отдельно рассмотрим подключение для устройств на Андроиде и Айфоне.
К iPhone
Приложение Mi Home для Айфона можно скачать через магазин App Store.
Программа является бесплатной, но в то же время имеет несколько важных системных требований:
- 336 Мб свободного места;
- наличие iOS 9.0 и более актуальной версии операционной системы;
- разрешение на доступ к геолокации.
Отрадно, что в приложении есть русский язык
Это значительно упростить процесс подключения, но все-таки важно изучить данный алгоритм от начала и до конца
Программа встречает пользователя приветливым интерфейсом. Для начала нужно создать профиль своего дома, а уже затем подключать пылесос. Чтобы добавить новое устройство, требуется нажать кнопку «+». Из списка доступных приборов выбираем свой пылесос (можно воспользоваться поиском).
Дальнейшая инструкция появляется на экране смартфона. Здесь говорится о том, что пользователь должен активировать пылесос, нажав соответствующую кнопку на корпусе. Кроме того, включается датчик Wi-Fi для обнаружения.
Теперь нажимаем кнопку «Далее», чтобы завершить подключение. На финальном этапе нужно выбрать сеть Wi-Fi, которая будет использоваться для работы пылесоса и управления им.
На этом процесс подключения можно считать завершенным.
К Android
Сопряжение со смартфоном под управлением операционной системы Андроид происходит похожим образом. Главное отличие от Айфона – другой магазин приложений. В данном случае понадобится Google Play.
Программу легко найти в магазине приложений, используя функцию поиска. Нажимаем кнопку «Установить» и ждем пару минут, когда ПО полностью установится на смартфон. Учтите, что программа работает на устройствах с Android 4.4 и выше.
Дальнейший план действий мало чем отличается от инструкции, представленной для iPhone. Вы можете вернуться к предыдущему пункту материала, чтобы ознакомиться с классическим алгоритмом действий. А мы сейчас рассмотрим альтернативный вариант, где сначала нужно не открыть приложение, а включить Xiaomi Mi Robot нажатием двух кнопок на корпусе.
После нажатие указанных кнопок включается режим обнаружения, поэтому сразу же открываем Mi Home и кликаем по значку «+» для добавления нового устройства.
При условии стабильного соединения Wi-Fi пылесос отобразится на общей карте. Подключаем девайс к маршрутизатору и нажимаем кнопку «Далее». Все! Процесс сопряжения завершен.
При подключении постарайтесь расположить пылесос с док-станцией в непосредственной близости от маршрутизатора.
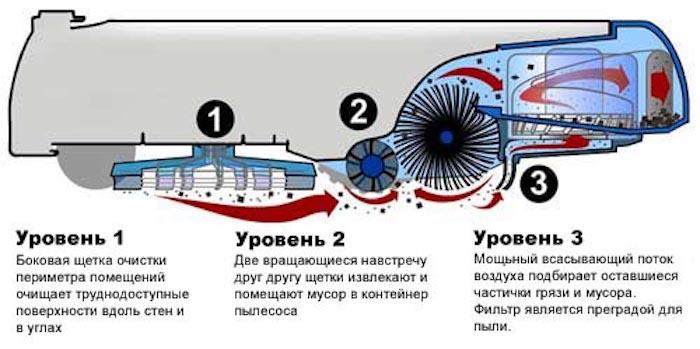
Как работает робот пылесос
Работа пылесоса начинается с предварительного сканирования окружающего пространства. Частота сенсорных сигналов составляет до 65 в секунду. Информация поступает в процессор, выдающий команду, актуальную на данный момент. С изменением обстановки, будут меняться и соответствующие команды на совершение действий.
Все роботы, независимо от модели, работают по следующей схеме:
- От базы пылесос выдвигается в центр помещения.
- Далее начинается движение от центра по спирали.
- Все препятствия, встречающиеся на пути, обходятся вдоль, слева или справа.
- Пылесос будет работать до снижения заряда батареи. В этом случае в процессор поступает сигнал, и робот возвращается на базу для подзарядки.
Режимы и процесс уборки
Режим работы определяется самим устройством после сканирования пространства. Информация включает в себя размеры помещения, расположение мебели и других предметов. На основе этих данных составляется карта и определяется маршрут. Движения закладываются в виде прямых линий от стены до стены, или спирально – от центра к краям.
Когда робот-пылесос доходит до стены или подъезжает к ступенькам, его курс тут же изменяется, чтобы не потерять контакт колесиков с плоской поверхностью. В установленное время запускаются щетки, мусор всасывается и перемещается в определенном направлении, попадая в пылесборник.
Автономность
Автономная работа пылесоса обеспечивается аккумуляторной батареей. Самые простые модели при разрядке отключаются, и затем вручную устанавливаются на ДОК-станцию. Более продвинутые устройства в таких случаях самостоятельно ищут базу, чтобы встать на зарядку.
Поиск базы происходит с помощью датчика, расположенного в передней части на бампере. Он обнаруживает ИК-луч, поступающий с зарядного устройства и подает команду на перемещение в этом направлении.
В пылесосах, оборудованных лазером или камерой, расположение базы фиксируется в памяти. По завершении уборки, аппарат двигается к базе по ранее сохраненному маршруту. В связи с этим, нельзя вручную переносить прибор к месту уборки, если он выключен. Пылесос не запомнил выезд со станции и не сможет самостоятельно вернуться на место.
Конструкция робота пылесоса
Современный рынок предлагает потребителю невероятный ассортимент моделей умных уборщиков, которые отличатся габаритами, способом ориентирования, алгоритмом действий и наличием дополнительных возможностей. Внешне, большинство моделей данной категории выглядят в виде диска из ударопрочного и легкого полимера с установленным на нем бампером, предотвращающим повреждение устройства при столкновении с препятствием.
В зависимости от модели диаметр устройства может быть от 250 до 350 мм. Высота от пола до верхней точки корпуса не более 130 мм.
Устройство бытового робота пылесоса включает в себя следующие элементы и механизмы:
- Видеокамеру, которая дает прибору возможность ориентирования. Благодаря камере робот составляет карту перемещения и корректирует план уборки.
- Пылесборник — съемный, пластиковый, многоразовый контейнер с емкостью от 0,4 до 1 л, который вынимается из корпуса нажатием специальной кнопки.
- Фильтры очистки, предназначенные для очистки от пыли выходящих из устройства воздушных потоков. Конструкция фильтроэлементов дает возможность владельцу проводить их обслуживание самостоятельно.
- Мощный механизм всасывания, который в совокупности с продуманной системой перемещения щеток, обеспечивает качественную уборку при крайне низком уровне шума.
- Датчики необходимы для сканирования пространства, отслеживания пройденного расстояния, определения препятствий, «обрывов» и участков с максимальным загрязнением.
- Колеса для передвижения. Практически все модели роботов-пылесосов оснащены тремя колесами: два боковых отвечают за перемещение устройства; колесо в передней части является вспомогательным. Управление осуществляется переменной передачей крутящего момента на каждое их боковых колес.
- Li-Ion аккумулятор. Емкость батареи от 2 до 4 А/ч, чего достаточно для работы без подзарядки в течении 2-3 часов. Время полной зарядки от 3 до 9 часов.
- Щетки для уборки обеспечивают захват мусора и перемещение его к механизму всасывания.
- Пазы для полотера, предусмотрены в моделях для влажной уборки.
За передвижение и управление устройством отвечают электромоторы, которых, в зависимости от модели может быть 5 или 6.
- По одному мотору на каждое ведущее колесо.
- Один отвечает за работу механизма всасывания.
- Один управляет вращением боковой щетки (в моделях с двумя боковыми щетками задействовано два силовых агрегата).
- Последний отвечает за вращение турбощетки.
 Как устроен робот-пылесос?
Как устроен робот-пылесос?